
The ability to create highly accurate 3D maps quickly has become increasingly important in recent years. This is where SLAM (Simultaneous Localization and Mapping) technology comes in. In this blog post, we will provide an in-depth look at what SLAM is, how it works, and how to choose the right one for you. By the end of this post, you will have a comprehensive understanding of SLAM and its significance.
What is SLAM Technology?
SLAM refers to the process of creating a 3D map by fusing data from multiple sensors such as Lidar, cameras, and IMU (Inertial Measurement Unit). It is a crucial component in many fields including robotics, autonomous vehicles, and computer vision.
The short history of SLAM dates back to the late 1980s when GPS systems became commercially viable. Since then, Lidar technology has been integrated into these systems to improve their accuracy. Research and development have rapidly advanced since then, creating various types of SLAM systems.
There are two main types of SLAM: Visual SLAM and Lidar SLAM.
Visual SLAM: This type of SLAM uses camera data to create a 3D map. It is commonly used in computer vision applications.
Lidar SLAM: As the name suggests, this type of SLAM uses Lidar data to create a 3D map. It is ideal for creating highly accurate maps in outdoor environments.
How does SLAM work?
SLAM works by collecting data from multiple sensors and fusing it together to create a 3D map. The process involves several steps:
Data Collection and Preprocessing: Data from various sensors is collected and preprocessed to remove any noise or errors.
Localization and Mapping Algorithms: This step involves using the collected data to create a 3D map. There are various algorithms available for this purpose, such as the Kalman filter.
Path Planning and Obstacle Avoidance: Once the map is created, SLAM systems use it to plan paths for robots or vehicles to navigate through their environment. They also use this information to avoid obstacles.
SLAM Integration with Robot Navigation: Finally, the SLAM system integrates with the robot's navigation system to enable autonomous movement.

What's The Right SLAM For You?
The choice of SLAM system depends on the specific application. For instance, if you want to create a highly accurate 3D map fast, Lidar SLAM would be the better option. However, if you want SLAM for computer vision (Augmented Reality), Visual SLAM would be the better choice. Choosing the right SLAM system depends on the specific application requirements.
Firstly, it is crucial to assess the speed and accuracy of the SLAM system in generating maps. A faster and more precise system can save time and resources while providing higher-quality results. Secondly, the system's ability to capture data in real-time is vital for applications such as augmented reality, where the environment may be constantly changing. A system that can capture data rapidly can provide a continuous and updated map. Lastly, it is important to evaluate whether the system is suitable for use in diverse environments. An SLAM system that can adapt to different environments, such as indoor and outdoor spaces, can enhance its overall usefulness.
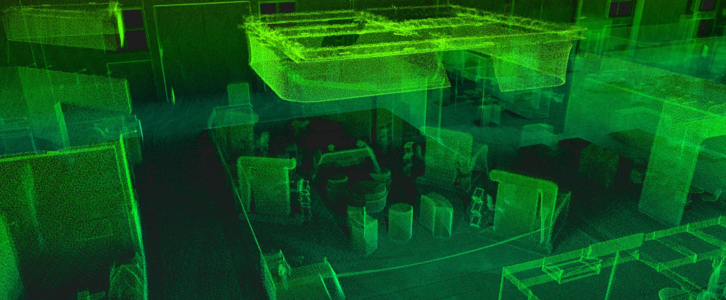
The FJD 3D SLAM Lidar Scanner with SLAM is a device that quickly and accurately creates 3D maps. It uses a Lidar scanner to measure the distance, angle, and speed of laser signals from target points to create a 3D point cloud of the area. The SLAM technology processes this data along with other sensors to create a reliable 3D map through algorithms. This technology is used in robotics, autonomous vehicles, and surveying to navigate and detect objects. The combination of Lidar and SLAM is essential for generating accurate mapping data.
Conclusion
SLAM technology has become an essential tool in many fields. By understanding the different types of SLAMs and how they work, you can choose the right system for your specific needs. With advancements in technology, the future of SLAM looks promising. Thus, we can expect to see even more innovative applications like FJD 3D SLAM Lidar Scanner in the coming years.


{kind=link}